Лаборатория робототехнических систем

Заведующий лабораторией - Филаретов Владимир Федорович,
доктор технических наук, профессор, Заслуженный деятель науки РФ, Заслуженный изобретатель РФ, Заслуженный инженер РФ.
Состав лаборатории
Всего сотрудников - 7,
научных сотрудников - 5, из них:
докторов наук - 1,
кандидатов наук - 4.
История лаборатории
Лаборатория робототехнических систем была создана 1 ноября 1997 года. Заведующим лабораторией был избран доктор технических наук, профессор В.Ф. Филаретов. Основу лаборатории, в которой на первых порах был только один штатный научный сотрудник кандидат технических наук А.В. Лебедев, составили совместители ДВГТУ: доктора технических наук, профессора А.Н. Жирабок и А.Е. Шумский, кандидаты наук А.А. Дыда и В.В. Чебоксаров, а также аспиранты А.А. Кацурин и Д.А. Юхимец.
Помимо научной работы важным направлением своей деятельности лаборатория считает подготовку высококвалифицированных научных кадров для проведения фундаментальных исследований в стенах ИАПУ и ИПМТ ДВО РАН, а также для создания прикладных научно-внедренческих структур и структур научно-технического менеджмента в области комплексной автоматизации производственных процессов. Для эффективной реализации этого направления созданы базовая кафедра ДВГТУ в ИАПУ ДВО РАН "Автоматика, управление и информатика в технических системах" (2007 год) и научно-образовательный центр "Автоматизация и управление высокотехнологичными производствами" (2008 год), в состав которого кроме сотрудников лаборатории входят преподаватели профильных кафедр ДВГТУ.
Основные направления научных исследований
- Создание интеллектуальных систем управления подводными роботами различного вида и назначения, способными быстро и точно перемещаться в водной среде в условиях неопределенности параметров взаимодействия с этой средой.
- Разработка методов синтеза адаптивных и самонастраивающихся автоматических и полуавтоматических систем управления манипуляционными устройствами и другим автоматизированным оборудованием, позволяющим с высокой производительностью выполнять сложные и ответственные операции в условиях современного производства.
Основные результаты
- Разработаны алгебраические методы обнаружения и поиска дефектов в нелинейных динамических системах. Решена задача диагностирования технических систем, описываемых нелинейными динамическими моделями, в условиях действия дестабилизирующих факторов. Предложен метод синтеза генератора невязки на основе адаптивных соотношений паритета, формируемых в реальном времени посредством обработки текущих управляющих и выходных сигналов диагностируемой системы. Предложены новые методы диагностирования дефектов в манипуляционных роботах, описываемых нелинейными динамическими моделями.
- Предложены методы синтеза многоканальной адаптивной системы с переменной структурой и неидеальностью переключающего устройства для централизованного управления автономным подводным аппаратом. Разработана и исследована структура нелинейных корректирующих устройств, обеспечивающих изменение пространственной ориентации многомерной гиперповерхности переключения. Доказаны достаточные условия существования устойчивого режима скольжения при наличии существенного взаимовлияния между всеми каналами управления.
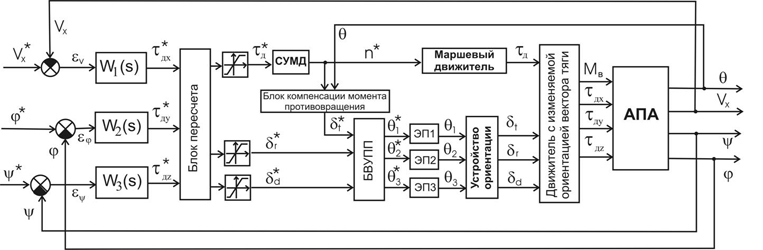
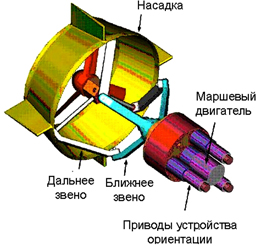
- Предложена новая концепция и новый метод управления движением подводного аппарата по произвольным траекториям с помощью только одного движителя, вектор тяги которого может изменяться в пространстве относительно продольной оси этого аппарата с помощью специального сферического механизма. Разработан метод, а также системы непрерывной стабилизации и координации требуемых вращении элементов механизма поворота для точной ориентации оси тяги винта в пространстве в процессе движения аппарата по заданной траектории. Предложена оригинальная конструкция трехстепенного сферического параллельного механизма, позволяющего придать нужную пространственную ориентацию вектору тяги движителя относительно корпуса автономного подводного аппарата.
- Разработан новый метод синтеза высокоточного комбинированного позиционно-силового управления электроприводами постоянного тока на основе квадратичного критерия качества. Разработан и исследован новый метод синтеза высококачественных позиционно-силовых систем управления манипуляторами, который без использования податливости механизма и многокомпонентных силомоментных датчиков позволяет обеспечивать одновременное управление и пространственным движением рабочего инструмента, и силовым воздействием на объекты работ.
- Разработан универсальный программный комплекс для визуального моделирования и исследования пространственных движений подводных аппаратов различного вида и назначения. Разработан подход к моделированию пространственного движения подводного аппарата с использованием виртуальной среды, позволяющий учесть влияние распределенных характеристик окружающей среды (течений, магнитных полей и т.д.).
- Разработаны методы полуавтоматического позиционного и комбинированного телеуправления многостепенными манипуляторами с помощью задающих устройств специальной конструкции. Предложены и исследованы алгоритмы работы вычислительных систем, формирующие задающие воздействия на приводы всех степеней подвижности манипуляторов.
- Разработан метод автоматического формирования программных сигналов движения автономного подводного аппарата, позволяющих обеспечить движение этого аппарата по сложной пространственной траектории с максимально возможной скоростью и с отклонением от траектории не превышающим заданную допустимую величину.
|
|
Система управления подводным аппаратом
|
|
|
|
|
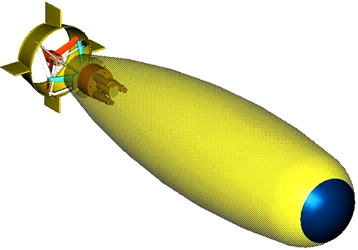
Подводный аппарат с одним поворотным движителем
|
Внешний вид поворотного механизма
|
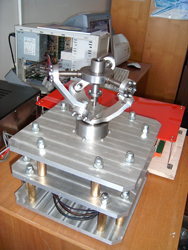
Макет поворотного механизма
|
Основные публикации
- Филаретов В.Ф. Cамонастраивающиеся системы управления приводами манипуляторов. - Владивосток: ДВГТУ, 2000. 304 с.
- Филаретов В.Ф., Алексеев Ю.К., Лебедев А.В. Системы управления подводными роботами // - М.: Круглый год, 2001. 288 с.
- Filaretov V.F., Vucobratovic M., Zhirabok A.N. Parity Relation Approach to Fault Diagnosis in Manipulation Robots // Int. Journal. Mechatronics, Pergamon Press. 2003. V.13, pp. 141-142.
- Cavallo E., Michelini R., Filaretov V.F. Conceptual design of an AUV equipped with a three degrees of freedom vectored thruster // Int. Journal. Intelligent and Robotic Systems. 2004. V. 39, pp. 365 - 391.
- Филаретов В.Ф., Лебедев А.В., Юхимец Д.А. Устройства и системы управления подводных роботов. - М.: Наука, 2005. 270 c.
- Филаретов В.Ф., Бобков В.А., Юхимец Д.А., Мельман С.В., Борисов Ю.С. Программный комплекс моделирования пространственного движения автономного подводного аппарата // Меатроника, автоматизация, управление. № 1. 2007. - С. 8-13.
- Филаретов В.Ф., Кацурин А.А. Метод полуавтоматического позиционного управления манипулятором с помощью телекамеры, изменяющей пространственную ориентацию своей оптической оси // Мехатроника, автоматизация, управление. № 9, 2008. С. 15-22.
- Филаретов В.Ф., Зуев А.В. Особенности создания комбинированных позиционно-силовых систем управления манипуляторами // Изв. РАН. Теория и системы управления. №1. 2009. С. 154-162.
- Лебедев А.В., Филаретов В.Ф. Система с переменной структурой для централизованного управления движением автономного подводного аппарата // Мехатроника, автоматизация, управление. №4. 2009. С.73-78.
- Филаретов В.Ф., Юхимец Д.А. Синтез системы автоматического формирования программных сигналов управления движением подводного аппарата по сложным пространственным траекториям // Изв. РАН. Теория и системы управления. №1. 2010. С. 112-120.